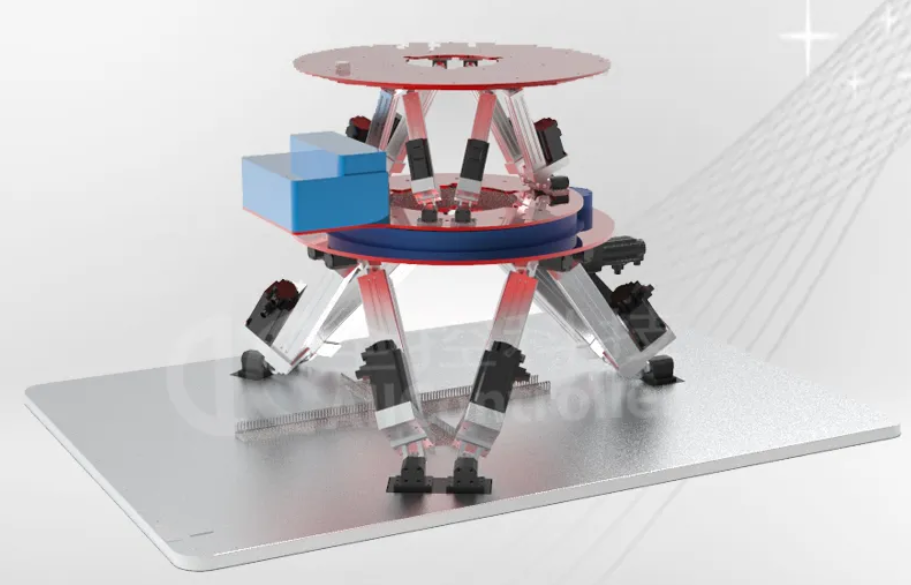
破譯六自由度機器人
基于六自由度機器人有著良好的性能和靈活性,其與多種工具結合使用,并應用于許多不同的任務。然而,每次引入一個新的工具,都需要精準的校準,然后才能發揮機器人的能力。通常校準耗時很長而且不準確,防礙和拖延了工業過程的生產和平穩運行。現在科研人員創造了一個有效的定位教學法,可以快速校準六自由度機器人使用新的工具且不依賴于制造商的測量或外部傳感器。該方法簡單、準確,實用性強。
校準
六自由度機器人在執行任務時需要保持和移動工具。為了獲得滿意的性能,機器人在工作時必須知道工具的準確位置。每次裝配不同的工具時,機器人必須再次精確地校準。
校準六自由度機器人有不同的方法。如接觸參考組件,使用距離傳感器,以及使用激光干涉測量。此外,外部傳感器,如攝影系統,可以安裝在機器人的不同位置,以獲得機器人校準參考對象的精確位置。
這些方法既費時又復雜。現在科研人員已經開發出一種更簡單的方法,取得了良好的效果。我們將解釋下面的方法。
確定工具的中心
我們使用運動學派的準確方法來確定工具中心點(TCP),并且所有的機器人定位都是在這一點的基礎上定義的。TCP是在世界坐標系中定義的,笛卡爾坐標系統可以定位世界上的任何一點。相對于機器人,坐標系統始終保持靜止。
工具坐標系
工具坐標定義工具的位置和姿態,坐標的零點位于工具的中心點(TCP)。機器人的TCP在執行笛卡爾運動時將移動到編程位置。更換工具將改 變工具的坐標系統,因此它需要重新調整,新的TCP可以到達目標準確位置。在許多機器人應用中,TCP的軌跡意味著機器人工作空間中的一條復雜路徑,通常是一個具有可變姿態的線性路徑。這個工具本身需要偶爾更換,甚至需要經常更換。每次更換工具時,必須在機器人恢復之前確定和配置一組新的幾何參數。在大多數工業應用中,位置指令是最實用的機器人任務規劃方法。在使用這種方法時,必須有高精度的刀具參數(通常是來自制造商),包括刀具的角偏差(偏航、俯仰和滾轉)和笛卡爾偏移,從而產生具有可控刀具姿態的直線軌跡。
遺憾的是,操作者經常發現幾何參數識別工具會受到一定的限制,例如:(1)從制造商的工具上獲取數據的大小;(2)沒有可用的硬件幫助;(3)不知道工具是如何安裝到機器人法蘭上的。面對這些限制,每次更換工具時,操作者必須浪費大量的時間來校準工具。
簡化校準的精確評價
科研人員已經開發出了一種快速、準確的刀具幾何參數估計方法,無需外部傳感器,視覺或其他援助,而無需拆卸工具。在這個位置的教學方法,只需放在幾個不同的崗位和職位了六自由度機器人TCP,然后自動輸入工具尺寸評價算法。該算法能快速確定新工具的精確標定參數,使刀具能夠快速投入使用。
隨著刀具位置和姿態樣本的增加,該標定方法的精度將得到提高。我們的實驗表明,逆齊次變換矩陣可能不能產生預期的結果,但使用最小二乘法將產生精確的校準值。
關鍵詞: 六自由度機器人
主站蜘蛛池模板:
国产亚洲系列
|
国产黄在线观看免费观看不卡
|
美女免费av|
亚洲xxxxxx|
亚洲国产最新
|
国产极品一区二区
|
深夜福利av
|
一区二区av在线
|
亚洲国产成人一区二区三区
|
自拍成人福利视频免费在线观看
|
久久久无码精品一区二区三区蜜桃
|
在线免费h
|
九色国产
|
日韩精品一区二区免费视频
|
欧美在线视频你懂的
|
疯狂做受xxxx高潮视频免费
|
在线黄网站
|
最近的中文字幕在线看视频
|
日本高清aⅴ毛片免费
|
青草精品国产福利在线视频
|
少妇av射精精品蜜桃专区
|
98堂 最新网名
|
99成人免费视频
|
可以免费观看的av
|
国产在线精品一区二区
|
少妇aa|
亚洲国产精久久久久久久
|
fc2成人免费人成在线观看播放
|
视频一区二区三区免费
|
亚洲欧洲日产国产 最新
|
久久99精品久久久久久吃药
|
一本之道乱码区
|
精品视频在线一区二区
|
欧洲国产伦久久久久久久
|
少妇激情偷人三级
|
日韩在线激情视频
|
jyzz中国jizz十八岁免费
|
成人免费在线观看
|
中文字幕免费观看
|
国产在线看一区
|
国产在线久
|
色哟哟国产精品色哟哟
|
一卡二卡三卡在线视频
|
国产亚洲精品精品国产亚洲综合
|
男女一级黄色
|
久久亚洲精品久久国产一区二区
|
久草在线视频精品
|
看欧美一级片
|
aaa级吃奶摸下免费视频
|
国产精品久久久久影院
|
丰满少妇一区二区三区专区
|
a在线观看视频
|
日韩第八页
|
国产一区在线观看视频
|
日韩 在线 中文 制服一区
|
国产午夜成人免费看片
|
亚洲人成亚洲人成在线观看
|
国产精品第一
|
性人久久久久
|
日本欧美高清视频
|
亚洲成人一二三
|
高清不卡视频
|
人妻丰满熟妇av无码区乱
|
国产精品久久一区二区三区
|
九九99视频
|
久久久啊啊啊
|
国产一区二区视频在线播放
|
亚洲欧洲一二三区
|
久久精品av
|
亚洲国产精久久久久久久
|
亚洲精品无码久久久
|
国产精品麻豆免费观看
|
日韩免费影视
|
中文字幕系列
|
欧美激情精品久久
|
欧美色精品
|
爱爱网站视频
|
超碰极品|
羞羞视频网站
|
亚洲免费视频一区
|
91亚洲精品久久久蜜桃
|
柳州莫菁菁av一区
|
热热热av
|
成人国产精品久久久网站
|
久久久久久久久久久久久久国产
|
亚洲综合av色婷婷
|
干日韩美女|
亚洲欧洲自拍偷拍
|
欧美激情高潮
|
天天狠天天透天天伊人
|
京香julia在线观看
|
亚洲第一福利视频
|
一边摸一边做爽的视频17国产
|
亚洲欧美人成电影在线观看
|
亚洲日韩精品欧美一区二区
|
中文天堂在线www
|
欧美大白腚pics
|
日本一本久
|
四虎av永久在线精品免费观看
|
日韩欧美毛片
|
波多野结衣在线视频免费观看
|
久久久久成人精品无码中文字幕
|
亚洲色婷婷久久精品av蜜桃
|
中文字幕乱码亚洲无线三区
|
日韩大片免费看
|
亚洲国产中文字幕在线
|
久久99精品久久久久久水蜜桃
|
色资源在线
|
www色网站|
亚洲成人国产精品
|
中文字幕日韩人妻不卡一区
|
国产乱人伦精品
|
97国产在线观看
|
视频一区在线观看
|
乌克兰粉嫩xxx极品hd
|
成年人视频免费在线观看
|
午夜资源网
|
欧美z○zo重口另类黄
|
4438x成人网最大色成网站
|
国产一线av
|
毛片网站在线播放
|
日韩毛片精品
|
特黄视频|
日本在线观看a
|
中文字幕在线观看不卡
|
国产三级在线
|
国产日韩一区
|
国产jizz视频全部免费软件
|
又硬又粗又大一区二区三区视频
|
欧美一级性视频
|
亚洲综合视频一区
|
久久精品亚洲一区二区三区浴池
|
免费a级黄色片
|
99久久婷婷国产综合精品青草免费
|
国产夫妻自拍av
|
久久视频这里有久久精品视频11
|
欧美精品密入口播放
|
色偷偷av|
久久国产秒
|
午夜黄色av
|
精品视频在线观看一区二区
|
成人精品一区二区户外勾搭野战
|
久久欲|
极品无码国模国产在线观看
|
狠狠色综合网久久久久久
|
www.com捏胸挤出奶
|
999精品在线
|
久久22|
99精品一区二区三区无码吞精
|
伊人网在线免费观看
|
亚洲一区精品视频
|
久久黄色成人
|
中文字幕精品一二三四五六七八
|
国产视频观看
|
国产极品在线观看
|
3344国产精品免费看
|
人人草人人干
|
日韩亚洲国产欧美
|
五月婷婷丁香激情
|
1000部夫妻午夜免费
|
久久精品呦女
|
国产亚洲精品成人av在线
|
国产欧美一区二区三区不卡视频
|
欧美性受xxxxxx黑人xyx性爽
|
成人av毛片
|
国产特级毛片潘金莲
|
国产极品久久
|
中文字幕91爱爱
|
这里只有精品久久
|
99久久久无码国产精品6
|
手机在线毛片
|
国模欢欢炮交啪啪150
|
男女www视频
|
欧美老妇交乱视频在线观看
|
叶子楣裸乳照无奶罩视频
|
国产精品日韩一区二区
|
色婷婷夜夜躁狠狠躁麻豆免费
|
国产精品欧美福利久久
|
爱爱免费视频网址
|
日韩免费毛片
|
一本色道久久综合精品竹菊
|
欧美精品二区三区
|
人妻奶水人妻系列
|
www久久撸撸网
|
99热视屏
|
九色蜜桃臀丨porny丨自拍
|
青柠影视在线观看免费高清中文
|
亚洲一区二区三区四区五区乱码
|
熟女人妇 成熟妇女系列视频
|
永久免费国产
|
亚洲 欧美 日韩系列
|
最全aⅴ番号库网
|
懂色av一区二区三区免费观看
|
欧美性生活xxx
|
成–人–黄–色–网–站
|
97性视频
|
欧美精品亚洲一区
|
永久免费的啪啪网站免费观看浪潮
|
日本人添下边视频免费
|
人人妻人人妻人人片av
|
中文字幕av无码一区二区三区电影
|
亚洲日韩乱码中文无码蜜桃臀网站
|
久久久久夜色精品国产老牛91
|
亚洲精品沙发午睡系列
|
国产不卡视频一区二区三区
|
男女下面进入的视频免费午夜
|
www.av色|
国产综合内射日韩久
|
a视频免费看
|
性视频免费的视频大全2015年
|
午夜看片在线观看
|
拔擦拔擦8x海外华人永久
|
日本变态折磨凌虐bdsm在线
|
欧美日韩不卡一区二区
|
亚洲色图激情
|
日本精品人妻无码77777
|
熟女人妇 成熟妇女系列视频
|
国产乡下妇女做爰视频
|
极品少妇hdxx天美hdxx
|
中文字幕乱码人妻无码久久
|
大陆av在线
|
国产精品无码免费专区午夜
|
黄色顶级片
|
中文亚洲成a人片在线观看
99久久婷婷国产综合精品青草免费
|
女人色极品影院
|
看av网|
91 在线观看
|
欧美亚洲一级片
|
国产91成人欧美精品另类动态
|
亚洲综合伊人
|
日韩一区二区三区在线观看视频
|
丰满少妇猛烈进人免费看高潮
|
波多野结衣在线观看一区二区
|
精品国产一区二区三区久久久蜜月
|
国产精品国色综合久久
|
亚洲欧洲精品成人
|
欧美性生交xxxxx久久久
|
毛片一毛片二毛片三国产片
|
九九九热视频
|
精品久久久久久久久久久久久久
|
欧美另类videosbestsex日本
|
欧美精品videos另类日本
|
午夜熟女插插xx免费视频
|
欧美孕妇姓交大片
|
国产精品成人va在线观看
|
变态美女紧缚一区二区三区
|
日韩中文在线观看
|
老熟妇性老熟妇性色
|
色综合色综合
|
亚洲综合无码久久精品综合
|
欧美成人精品欧美一级私黄
|
日本少妇热妇bbbbbb
|
国内精品国产三级国产在线专
|
av涩涩|
亚洲精品一区二区三区高潮
|
青草视屏
|
在线播放黄色网址
|
黄片毛片在线看
|
内射老阿姨1区2区3区4区
|
亚洲精品无码专区在线在线播放
|
成人免费毛片嘿嘿连载视频
|
一本一道精品欧美中文字幕
|
加勒比色综合久久久久久久久
|
国产刚发育娇小性色xxxxx
|
ass亚洲日本嫩体私拍ass
|
五月天婷婷在线观看
|
www日本xxxx
|
牛牛视频一区二区三区
|
av天堂永久资源网
|
亚洲中文无码av在线
|
亚洲最新av在线
|
国产精品16p
|
成年人免费视频网站
|
亚洲精品喷潮一区二区三区
|
女人被男人躁得好爽免费视频
|
青草视频免费在线观看
|
色情毛片|
91久久偷偷做嫩草影院
|
欧美黑人性猛交xxxx
|
青青草一区二区三区
|
丰满白嫩欧洲美女图片
|
日韩av大片
|
国产又粗又猛又爽又黄的免费视频
|
无码国内精品久久人妻
|
国产乱人对白
|
成年人24小时无限看
|
亚洲一二三区不卡
|
国产成人精品免费视频
|
交100部在线观看
|
黄色aa毛片|
伊人www22综合色
|
欧美一区二区三区成人久久片
|
亚洲精品国产自在久久
|
91精品国产99久久久久久红楼
|
日韩成人高清在线
|
色狠狠av北条麻妃
|
国产精品av99
|
日日av|
奇米精品视频一区二区三区
|
一本到视频
|
天天摸天天舔
|
国产人妖视频一区二区
|
色月婷婷|
亚洲天堂2015|
а中文在线天堂
|
久久大香|
中文字幕人成乱码熟女app
|
佐佐木明希奶水喷出在线视频
|
在线观看欧美成人
|
人妻少妇被粗大爽9797pw
|
越南性xxxx精品hd
|
国产成人精品午夜福利在线观看
|
看免费黄色大片
|
亚洲大尺度无码无码专区
|
免费亚洲一区
|
www插插插无码免费视频网站
|
99久久国产视频
|
日韩久久无码免费毛片软件
|
国产又黄又粗的视频
|
精品久久国产
|
青草精品国产福利在线视频
|
女人被做到高潮视频
|
亚洲日本va在线视频观看
|
成人免费视频国产免费
|
一本之道之高码清乱码加勒比
|
福利视频在线播放
|
亚洲综合色婷婷在线观看
|
国产麻豆一精品一男同
|
欧美日韩一区二区综合
|
日韩免费影院
|
爱射综合
|
亚洲国产成人久久综合一区,久久久国产99
|
91最新视频
|
www国产国人免费观看视频
|
亚洲一片
|
26uuu亚洲国产欧美日韩
|
久久久久久国
|
国产福利精品在线观看
|
一本一生久久a久久精品综合蜜
|
国产又大又黑又粗免费视频
|
久久天天躁夜夜躁狠狠i女人
|
加勒比综合
|
看全黄大黄大色大片美女
|
欧美性猛交bbbbb精品
|
欧美日本一区二区三区
|
懂色av色香蕉一区二区蜜桃
|
男人的天堂在线播放
|
天天操夜夜操视频
|
一本色道无码道在线观看
|
国产三级精品三级在专区
|
国产美女无遮挡永久免费
|
免费的一级黄色片
|
又爽又黄又无遮挡的视频
|
欧美在线v
|
欧美日本一二三区
|
成人在线污
|
久草资源网
|
91精产国品一二三区在线观看
|
国产精品久久久久久久久久久久久久久久久久
|
红桃视频成人
|
国产亚洲美女精品久久久2020
|
一级大黄毛片
|
牛牛视频一区二区三区
|
亚洲欧美日本在线
|
免费观看又色又爽又黄的崩锅
|
日韩欧美中文字幕一区二区
|
日韩精品色
|
国产精品国产对白熟妇
|
日韩在线一区二区三区免费视频
|
xxxx性xx另类ⅹ亚洲hd
|
先锋影音人妻啪啪va资源网站
|
国产69精品久久久久999天美
|
欧美一区二区三区激情
|
亚洲第一成肉网
|
缅甸午夜性猛交xxxx
|
av九九九|
欧美亚洲一二三区
|
国产–第1页–屁屁影院
|
www色亚洲|
日本a大片
|
97在线免费视频观看
|
国产成人 综合 亚洲欧美
|
人妻少妇精品视频一区二区三区
|
国产新婚夫妇白天做个爱
|
又粗又大又黄又硬又爽免费看
|
亚洲一区av在线观看
|
久久网站热最新地址
|
67194少妇
|
高h喷水荡肉爽腐调教
|
欧美精品一
|
婷婷综合另类小说色区
|
不卡av网站
|
国产视频一区二区三区在线
|
国产精品xvideos88
|
白浆av|
精品国精品国产自在久国产应用
|
激情久|
欧美日韩人成综合在线播放
|
色翁荡息又大又硬又粗又爽电影
|
午夜免费播放观看在线视频
|
亚洲国产精品久久人人爱
|
黄色精品视频
|
久久免费激情视频
|
中文字幕一区二区人妻
|
激情综合激情五月
|
国模叶桐尿喷337p人体
|
无码 制服 丝袜 国产 另类
|
免费大片av手机看片高清
|
91精品久久久久久综合
|
国产精品欧美一区二区三区不卡
|
国产精品揄拍一区二区久久国内亚洲精
|
亚洲xxxx丝按摩袜
|
欧美成人黄色
|
lutu成人福利在线观看
|
中文字幕一区二区av
|
日韩色中色
|
国产一区二区欧美日韩
|
国产精品久久久久久久久久久痴汉
|
一卡二卡国产
|
国产乱码精品1区2区3区
|
www.久久伊人
|
精品国产乱码一区二区三
|
久草视|
波多野结衣办公室33分钟
|
国产无套粉嫩白浆内谢在a
国产无套粉嫩白浆内谢在线
|
女人爽到高潮免费看视频
|
五十路熟妇高熟无码视频
|
久久99精品久久久久久无毒不卡8
|
成人开心激情
|
亚洲黄色片
|
国产高清第一页
|
国产av毛片|
中文字幕一区二区三区四区五区
|
少妇特殊按摩高潮惨叫无码
|
黄色av网站在线播放
|
一区二区三区四区日韩
|
国产高清露脸
|
国产一区二区三区撒尿在线
|
日日艹夜夜艹
|
三级a毛片|
国产亚州精品女人久久久久久
|
日韩国产小视频
|
日韩女女同性aa女同
|
久久成人午夜
|
亚洲区免费中文字幕影片|高清在线观看
|
久久综合一
|
欧美黄频
|
噼里啪啦免费观看高清动漫
|
一级黄色片久久
|
亚洲国产一线二线三线
|
免费看48女人真人毛片
|
一区二区三区小说
|
国产免费爽爽视频
|
午夜精品在线免费观看
|
成 人 免费观看网站
|
特黄视频在线观看
|
久久国产尿小便嘘嘘97
|
日本丰满护士爆乳xxxx
|
西西午夜|
久久丫精品国产
|
国产又黄又硬又湿又黄的网站免费
|
国产欧美精品一区二区
|
中文字幕乱码一区二区三区
|
偷看农村女人做爰毛片色
|
国产高潮好紧好爽hd
|
久久久久久蜜桃一区二区
|
蜜桃视频在线观看www社区
|
农村偷人一级超爽毛片
|
亚洲色丰满少妇高潮18p
|
337p色噜噜|
国产精品va在线播放我和闺蜜
|
内射老阿姨1区2区3区4区
|
三级网站在线
|
红杏成av人影院在线观看
|
亚洲免费av网
|
亚洲一级网站
|
四虎精品一区二区免费
|
性折磨bdsm德国激情
|
国产人澡人澡澡澡人碰视频
|
欧美午夜性|
凹凸日日摸日日碰夜夜爽1
凹凸日日摸天天碰免费视频
|
福利网站在线
|
国产精品成av人在线视午夜片
|
免费观看一级黄色片
|
免费欧洲美女牲交视频
|
久久777国产线看观看精品
|
a级毛片 黄 免费a级毛片
|
国产精品一二三区成毛片视频
|
亚洲精品乱码久久久久久动图
|
久久久久久久久成人
|
成人国内精品久久久久影院成.人国产9
|
欧美久久久久久久久中文字幕
|
中文字幕成人在线视频
|
亚洲aⅴ精品一区二区三区91
|
把插八插露脸对白内射
|
大肉大捧一进一出好爽视色大师
|
久久精品国内
|
91视频xxx|
久久久久成人片免费观看蜜芽
|
99999久久久久久亚洲
|
绯色av蜜臀一区二区中文字幕
|
欧美国产亚洲日韩在线二区
|
国产精品久久婷婷六月丁香
|
亚洲精品国产精品乱码不99
|
www.-级毛片线天内射视视
|
美日韩中文字幕
|
国产稀缺真实呦乱在线
|
五月婷婷色综合
|
亚洲欧美一区二区精品久久久
|
深夜福利小视频在线观看
|
久久欧美精品久久天美腿丝袜
|
国产女无套免费网在线观看
|
偷拍亚洲精品
|
1204人成网站色www
|
欲妇荡岳丰满少妇岳
|
少妇又紧又色又爽又黄又刺激
|
第一福利在线
|
亚洲自偷自偷在线成人网站传媒
|
伊人久久中文
|
侵犯亲女在线播放视频
|
免费乱码人妻系列无码专区
|
51国偷自产一区二区三区
|
国产xxx18
|
欧美综合自拍亚洲综合图片区
|
国产草草影院
|
成人免费高清在线播放
|
亚洲免费看av
|
美国人性欧美xxxx
|
日韩久久影视
|
色综合色天天久久婷婷基地
|
成人午夜在线观看视频
|
av五月天在线|
国产亚洲精久久久久久无码
|
日韩欧美视频免费在线观看
|
国语自产少妇精品视频
|
绯色av蜜臀一区二区中文字幕
|
内射人妻视频国内
|
免费av播放|
综合色婷婷一区二区亚洲欧美国产
|
午夜成人爽爽爽视频在线观看
|
蜜臀av人妻国产精品建身房
|
国产成人av一区二区
|
国产午夜三级
|
国产一线二线三线女
|
永久免费不卡在线观看黄网站
|
日韩中文字幕免费视频
|
秋霞国产午夜精品免费视频
|
欧美精品一级
|
97久久综合区小说区图片区
|
丝袜脚交一区二区
|
成x99人av在线www
|
国产在线精品一区二区三区不卡
|
三级艳丽杨钰莹三级
|
国产特级毛片aaaaaa毛片
|
国产爆初菊在线观看免费视频网站
|
亚洲成av人乱码色午夜
|
久久久国产精华液999999
|
大江大河第3部48集在线观看
|
免费一级特黄特色的毛片
|
99久久人人爽亚洲精品美女
|
中国丰满猛少妇xxxx
|
噜噜色图
|
久久久久综合
|
久久精品国产网红主播
|
日本www一道久久久免费榴莲
|
影音先锋欧美资源
|
国产特级毛片aaaaaa高清
|
爱看av在线
|
一区二区三区av夏目彩春
|
男女啪啪120秒
|
午夜福利在线永久视频
|
免费无码毛片一区二区app
|
黄色片日韩
|
亚洲爱爱图
|
少妇精xxxxx
少妇精品
|
欧洲s码亚洲m码精品一区
|
日本一本一道
|
三上悠亚人妻中文字幕在线
|
精品福利一区二区三区免费视频
|
国产精品视频一区二区三区,
|
久久久久国色av免费观看性色
|
国产成人综合亚洲
|
欧美黄色成人
|
cekc老妇女cea0
|
国产精品久久一区
|
国产让女高潮的av毛片
|
av福利在线
|
理论片第一页
|
国产最猛性xxxx
|
麻豆精品在线视频
|
亚洲草草网
|
精国产品一区二区三区四季综
|
日本成人在线网站
|
亚洲精品电影院
|
亚洲女同一区二区
|
亚洲五月天综合
|
成人做爰免费网站
|
亚洲专区路线一路线二高质量
|
国产精品亚洲а∨天堂2021
|
精品国产一区二区三区粉芽
|
李丽珍a级裸体啪啪
|
久色精品视频
|
国产精品6区
|
伊人超碰|
初尝人妻少妇中文字幕
|
国产精品男人的天堂
|
成人欧美一区二区三区黑人
|
日本大尺度激情做爰电2022
|
国产午夜精品一区理论片飘花
|
亚洲精品国产成人
|
波多野结衣久久久久
|
巩俐性三级播放
|
久操热久操
|
法国伦理少妇愉情
|
性一交一乱一伦a片
|
 400 025 3599
400 025 3599 









 在線咨詢
在線咨詢 




