 400 025 3599
400 025 3599 




六自由度平臺是實現(xiàn)精確、靈活運動控制的重要設(shè)備,特別是在進行海浪補償實驗中,其獨特的和強大的功能顯示得尤為明顯。本文主要介紹六自由度平臺在進行海浪補償實驗中的應(yīng)用原理和結(jié)構(gòu)。
海浪補償原理:
海浪補償,顧名思義,是在海上進行的一種補償動作,主要用于抵消海浪帶來的運動影響。六自由度平臺在這方面扮演著關(guān)鍵角色,主要用于執(zhí)行三軸角度和三軸位移的補償。
海浪的非周期性和無規(guī)律性使得船舶在海面上的運動十分復(fù)雜,而六自由度平臺恰好可以提供六個方向上的自由度—前后、左右、上下、滾動、俯仰、偏航,充分滿足了海浪補償?shù)囊蟆?/p>
在實驗中,裝置首先測量海浪對船舶產(chǎn)生的動態(tài)影響,然后使用六自由度平臺生成反向的運動,從而實現(xiàn)對海浪影響的有效補償。
結(jié)構(gòu)原理:
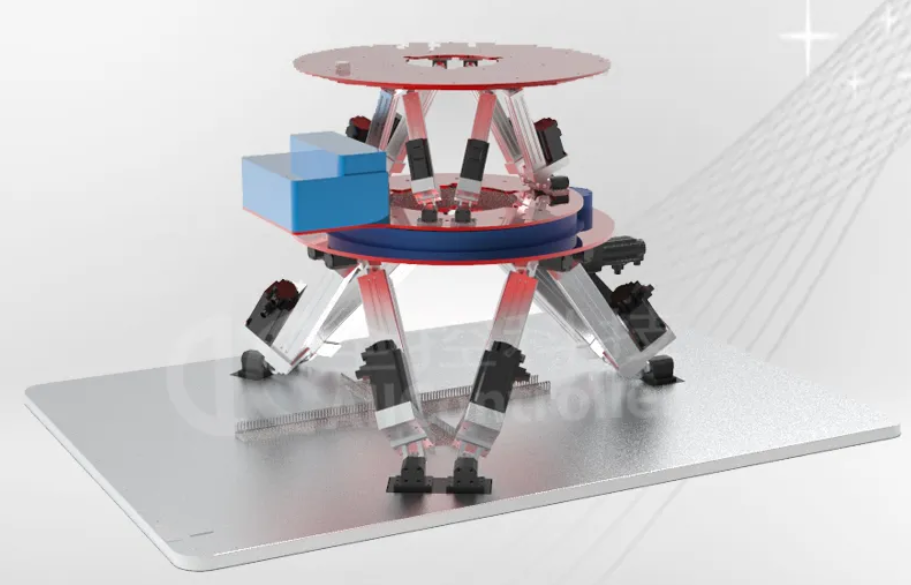
六自由度平臺在進行海浪補償實驗時主要由以下部分組成:
1、傳感器:經(jīng)由高精度傳感器收集海浪影響船舶的數(shù)據(jù),這些數(shù)據(jù)包括船舶在六個方向上的運動數(shù)據(jù)。
2、控制系統(tǒng):根據(jù)收集到的數(shù)據(jù),控制系統(tǒng)計算出反應(yīng)力,然后控制電動推桿進行相應(yīng)的操作。
3、伺服電動缸:是實現(xiàn)補償?shù)闹饕考Mㄟ^伺服電機驅(qū)動,將控制系統(tǒng)的指令轉(zhuǎn)化為實際的物理運動。
通常這樣的設(shè)備結(jié)構(gòu)緊湊,將所有所需成分集中在一個單元內(nèi),易于操作和維護。
總結(jié):
六自由度平臺在海浪補償實驗中起到了關(guān)鍵作用,利用其強大的控制能力和精細的運動調(diào)節(jié),有效地消除了海浪對船舶的影響。同時,由于其靈活性和精度,它對于海洋探索和船舶工作都具有極高的實用價值。預(yù)計未來在更多領(lǐng)域,六自由度平臺的應(yīng)用將會進一步深入和擴大。





 在線咨詢
在線咨詢 




