 400 025 3599
400 025 3599 




所謂自由度,指的是描述某力學(xué)系統(tǒng)所需的獨(dú)立坐標(biāo)數(shù)的個(gè)數(shù)。題目中應(yīng)該指的是機(jī)構(gòu)的運(yùn)動(dòng)自由度。
剛體在空間自由運(yùn)動(dòng)的時(shí)候,確定剛體的位置需要x,y,z三個(gè)獨(dú)立的空間坐標(biāo)數(shù),為其平動(dòng)自由度,確定其通過(guò)質(zhì)心軸的空間方位──三個(gè)方位角(α,β,γ)中只有其中兩個(gè)是獨(dú)立的──需兩個(gè)轉(zhuǎn)動(dòng)自由度;另外還要確定剛體繞通過(guò)質(zhì)心軸轉(zhuǎn)過(guò)的角度θ──還需一個(gè)轉(zhuǎn)動(dòng)自由度。所以空間中自由運(yùn)動(dòng)的剛體共有三個(gè)平動(dòng)自由度,三個(gè)轉(zhuǎn)動(dòng)自由度。
機(jī)械中一般將構(gòu)件視為剛體研究。剛性的構(gòu)件通過(guò)各種運(yùn)動(dòng)副連接起來(lái)組成各種可動(dòng)的機(jī)構(gòu)。在未構(gòu)成運(yùn)動(dòng)副之前,在空間中它們(指兩個(gè)剛性的構(gòu)件)的相對(duì)運(yùn)動(dòng)有六個(gè)自由度,但構(gòu)成運(yùn)動(dòng)副之后,其間的相對(duì)運(yùn)動(dòng)將受到約束,此時(shí)其自由度為6-約束數(shù)。
球面副是典型的III級(jí)運(yùn)動(dòng)副,即引入了三個(gè)約束的運(yùn)動(dòng)副,故其自由度為6-3=3;其平動(dòng)完全被限制住了,有的是三個(gè)轉(zhuǎn)動(dòng)自由度;
球銷副是IV級(jí)副,有兩個(gè)自由度。因?yàn)樗钠渲幸粋€(gè)方位上的轉(zhuǎn)動(dòng)也被限制住了。
在不考慮虛約束,復(fù)合鉸鏈以及局部自由度的情況下,可以給一個(gè)簡(jiǎn)單的計(jì)算空間中機(jī)構(gòu)自由度的公式:f=6N-(5*p5+4*p4+3*p3+2*p2+p1),其中f表示自由度,N表示構(gòu)件個(gè)數(shù),pi表示i級(jí)副的個(gè)數(shù),括號(hào)中指的是各種運(yùn)動(dòng)副引入的約束個(gè)數(shù)的和。
以上知識(shí)可以在機(jī)械原理以及其相關(guān)的課程中可以學(xué)習(xí)到。上面的很多答案都說(shuō)得不是很對(duì),我只同意@李智信的答案。
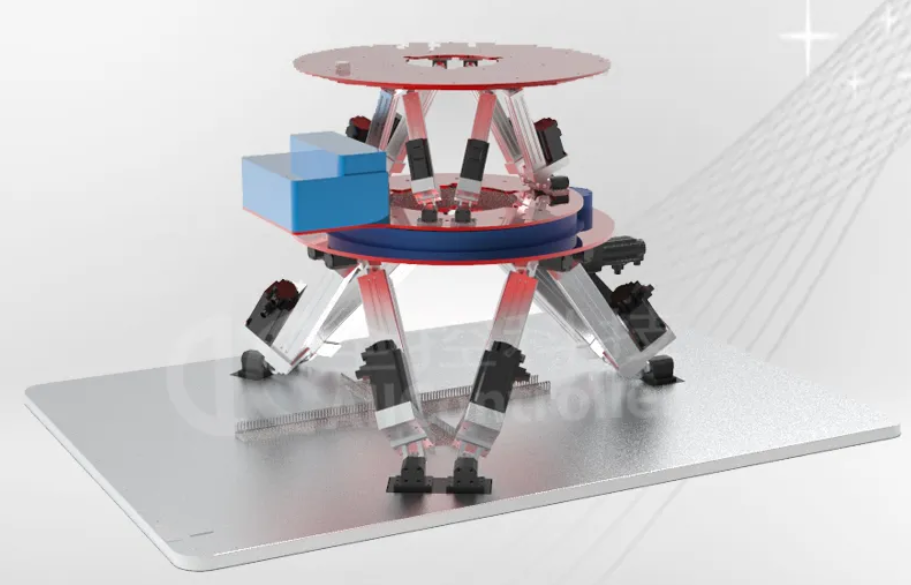
機(jī)器人設(shè)計(jì)中的機(jī)械臂自由度是比較大的,而且采用多舵機(jī)提供動(dòng)力分別傳動(dòng)的話,情況就更復(fù)雜一點(diǎn)了。現(xiàn)在很多實(shí)用的機(jī)械臂都是五個(gè)自由度的。





 在線咨詢
在線咨詢 




